
工业机器人行业研究报告:景气周期开启,智能制造先锋
381
2024-01-16

在人类从外界环境获取的信息中,70%来自于视觉。人通过眼睛从周围的环境中获取图像信息,由大脑对信息进行处理,从而识别、理解周围的环境。计算机视觉的目的,是建立以计算机为中心的视觉系统,通过图像传感器获取图像,使用计算机实现信息处理,从而实现对三维世界的理解,在一定条件下替代人类的部分视觉工作。研究基于机器视觉的检测技术,通过计算机分析数字图像实现对被测对象某些特性的检测。具体应用包括光纤端面检测与自动熔接,集成电路晶圆质量检测等。
单模光纤巨大的带宽容量使其较之传统的多模光纤更适合通信系统的搭建。随着光纤通信尤其是光纤到户(FTTH)的发展,对于便携式单模光纤熔接机的需求日益增长。为了满足这一要求,熔接机的元件必须精简和集成。本设计给出了一种便携式光纤熔接机图像系统的软硬件实现方案。通过改变照明方式并重新设计镜头,缩短了光路的尺寸。同时使用具有数字接口的 CMOS 图像传感器和高性能的微处理减小了电路主板的尺寸。改进后的熔接机尺寸为 120mm×90mm×105mm,不安装电池时的总重量为 1.2Kg。熔接机通过该图像系统获取光纤的坐标参数,从而自动完成光纤的对齐和熔接工作。实验显示该熔接机具有很好的稳定性,平均接续损耗小于0.2dB。

便携式光纤熔接机
王顺,张益昕,郭亚敏,张旭苹,路元刚,便携式单模光纤熔接机图像系统的研制[J],仪器仪表学报, 2009,30(6):234-237
Shun Wang, Yixin Zhang, A Robust Alignment Algorithm for Microprocessor Based Fiber Fusion Splicer[C],Image and Signal Processing, 2009: 1-4
金丝球焊线机是 LED 芯片封装中的关键设备,通过安装图像识别系统可以对手动式的金丝球焊线机进行自动化改造。现有的芯片定位算法运算量大,鲁棒性较差,对应用环境有很强的要求。本设计提出了一种基于金字塔分解和色彩分析的图像匹配算法。该算法首先通过金字塔分解对目标图像进行分层搜索,使得匹配运算量呈几何级地减少。再通过对图像的红、绿、蓝三路颜色通道分别进行匹配和分析,提升定位的精度和鲁棒性。该设计已经在嵌入式系统上得到了实现,并在工业上得到应用。

基于嵌入式系统的金丝球焊线机
Yixin Zhang, Shun Wang, Xuping Zhang, Xuejun Lu, Motion blurred image restoration algorithm for IC wire bonder[C], Proceedings of SPIE - The International Society for Optical Engineering, 2009, V7513
张益昕,王顺,张旭苹,基于嵌入式系统的全自动LED金丝球焊线机[C],中国光学大会,2010.8
微纳光纤能够将光限制在亚波长尺度内实现长距离微损耗的传输,这为光学器件微型化以及微芯片间的光互连提供了可能。同时由于微纳光纤具有亚波长的几何尺寸,使其具有大倏逝场和高光功率密度等特点,能够实现高灵敏度的光传感和非线性光学器件,有望应用于声光转换器、光学放大器、微腔器件、光子晶体耦合以及传感器等领域。这些特点使得微纳光纤成为今年来微纳光子学研究的一个新热点。获得微纳光纤的途径主要通过熔融拉锥。目前国内的光纤熔融拉锥设备基本依赖进口。少数的国产设备主要基于火焰熔融技术,加工精度有限。本设计针对微纳光纤器件加工的实际需要,实现了一种基于机器视觉反馈的全自动微纳光纤器件加工装置。
该装置通过图像采集设备,实时观测加工中的光纤。使用红外波段的CO2激光器配合扫描振镜和聚焦透镜作为加热装置对光纤进行熔融处理。由于激光波长在可见光范围之外,可以减小加热对图像采集设备的影响。通过专门的校准,可以确定图像与激光器焦平面之间的对应关系,从而实现激光光束对待加工光纤的精确瞄准。光纤的拉伸使用程控的精密电机平台实现。使用计算机对图像采集设备获取的图像进行分析,通过对图像数据的处理获取当前光纤锥体的形状参数,根据相应的算法,计算机会自动修正激光器和电机平台的工作参数,从而构成闭环控制回路,使得加工得到的器件形状尽可能逼近设计值。整个加工过程完全实现自动化控制,无需人工干预。

光纤微纳结构加工平台基于机器视觉反馈的全自动微纳光纤器件加工平台
铁路是国民经济的大动脉,其运输的安全不仅直接影响铁路系统的效益,还将影响社会生产和安定。而货运列车运输作为铁路运输的重要组成部分,其装载状态是保证行车运输安全的关键环节。在铁路货运列车运输中有一类特殊的运输项目,称为超限货物运输。它的运量在铁路总运量中所占比重不高,但其运输对象大部分是国家重点工程项目的关键设备,对国民经济的发展,特别是对国家基础建设和国防建设具有特别重要的意义。但是目前在铁路货物的装载、编组运输过程中,对于车辆是否超限的检测主要是通过人工测量完成的。检测人员只能在车辆停稳后使用标杆、水平尺以及铅垂线等工具简单地测量货物的高度和宽度,甚至在一些条件简陋的货运站仅凭经验目测,准确性差、效率低、劳动强度高、漏检率大。
我们提出了基于计算机视觉测量的便携式货运列车超限检测系统方案,可以实现对货运列车车体及货物三维几何尺寸的非接触式测量,并自动进行超限判断。其测量精度高、速度快,对于测量场地无特殊要求且不需要对现有场地的设备进行改造。测量过程中,使用支架搭载测量装置。支架的高度可以自由伸缩和固定,测量装置的俯仰可以调节。操作人员一旦架设好测量装置,则整个测量过程由计算机控制完成,实现了自动化测量。

货运列车限界测量仪结构示意图

货运列车限界测量仪
Fei Xie, Yixin Zhang, Shun Wang, Xuping Zhang, Li Qi, A Robust extrication method for structured light stripe[J], International Journal for Light and Electron Optics, Accepted
Li Qi, Yixin Zhang, Xuping Zhang, Shun Wang, and Fei Xie, Statistical behavior analysis and precision optimization for the laser stripe center detector based on Steger's algorithm[J], Optics Express, 2013, 21(11): 13442-13449.
Yixin Zhang, Shun Wang, Xuping Zhang, Fei Xie and Jiaqi Wang, Freight train gauge-exceeding detection based on three-dimensional stereo vision[J], Machine Vision and Applications, 2013, 24(3): 461-475
张益昕,王顺,张旭苹,大尺度三维视觉测量中的离焦模糊图像恢复[J],仪器仪表学报,2010,31(12):2748-2753.
张益昕,汪家其,王顺,张旭苹,俞乾,基于大尺度三维几何视觉的货运列车超限检测方法研究[J],仪器仪表学报,33(1):181-187,2012
张旭苹,汪家其,张益昕,王顺,谢飞,大尺度三维几何尺寸立体视觉测量系统实现[J],光学学报,33(1):41-47,2012
张旭苹,刘振乾,王顺,张益昕,基于双处理器架构的列车超限检测系统研究[J],仪器仪表学报,33(1):91-96, 2012
王顺,徐静珠,张益昕,张旭苹,谢飞,结构光光条中心点信度评价方法与应用[J],光学学报,2011 31(11):1115001
俞乾、张旭苹、张益昕、王顺、戚力, 一种新型三维视觉测量结构光平面标定方法,中国激光,2012 31(1):S108006
谢飞,张旭苹,张益昕,王顺,徐静珠,基于机器视觉的货运列车超限检测中基准面获取方法[J], 铁道学报,2012,34(10):72-78
近年来,石英晶体振荡器因为其无可取代的频率温度稳定性、低成本、成熟性,已经成为稳定频率来源的最佳、通常也是唯一选择。晶片在大批量生产过程中,会产生缺边、掉角、裂纹、划伤和形状尺寸不规则等质量问题,需要对产品外观进行实时检查,筛选。这种重复性的工作通常由人工在显微镜下观测完成。检测时由操作人员使用夹具手动将待检测石英晶片放置到显微镜的观测区,操作人员通过显微镜目测晶片的外貌并做出是否存在缺陷的判断,再使用夹具夹取晶片并进行分类。为了解决操作人员长时间工作视觉疲劳、身心疲劳带来的产品检验标准不统一、检验精度低等问题,本设计对当前石英晶片质量检测技术的不足,尝试提出一套新的测量方方案,可以对晶片的各种缺陷进行准确识别,并获取其特征参数。根据该检测方案研发样机,填补国内在基于机器视觉的石英晶片质量自动光学检测设备的空白。
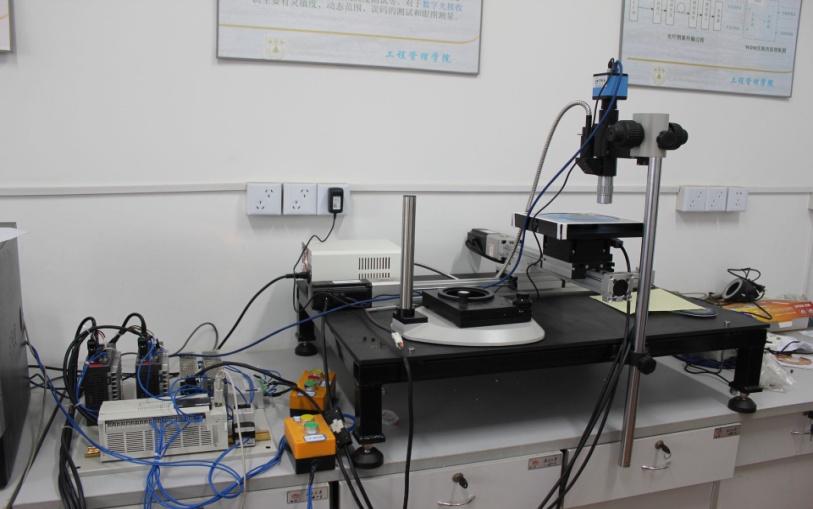
石英晶片质量检测仪
Xie Fei,Zhang Yixin, Wang Shun, Zhang Xupin, Xu Jingzhu, A Phase Congruency Based Corner Detector for Images Under Different Illuminations[C], Symposium on Photonics and Optoelectronics ,2011,5.
基于机器视觉的激光羽毛加工系统用于替代传统手工羽毛切割机生产羽毛球用羽毛。系统采用两个摄像头识别原始羽毛的空间位置和三维形状信息,由控制中心解算图像信息后针对不同的原始羽毛匹配不同的羽毛目标模板,按生成的切割路径控制大功率二氧化碳激光器光束经振镜系统聚焦在待切割的羽毛之上完成羽毛切割。系统的优点在于实现了羽毛切割的自动控制、可以兼容不同质量的原始羽毛、能对切割后的羽毛产品进行分类。这将是对传统羽毛球产业的一次巨大冲击。

激光羽毛加工系统
为保证火车敞棚车及货物运输途中的安全性,敞车在出货场前,要用铁丝对关闭的车门实施绞锁。目前,车门关闭、绞锁及车门闭锁状态的检查工作皆由人工完成,由于人工检查绞锁状态的效率低下,为此,开发了基于实时抓拍图像和数字图像处理的敞车车门绞锁检测系统。
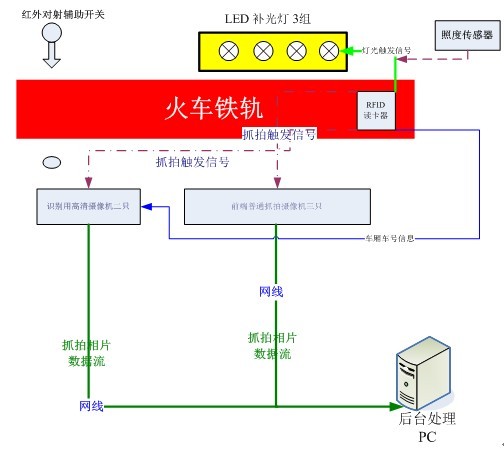
车门闭锁检测系统结构示意图
敞车车门闭锁检测系统的构成如上图所示,相机架设于车门两侧,其架设高度和与铁轨之间距离均固定。铁轨下放置传感磁钢,将磁钢产生的信号作为相机抓拍的触发信号,这样,保证相机可准确抓拍到车门图像。

敞车车门及其区域划分
区域A为车门,区域B、C为车门绞锁位置
上图为待检测的敞车车门,由于被检货车在运动中,所以在CCD中获取到的车门位置图像随车速而变化,故首先需对抓拍图像中的车门进行定位。车门定位采用Harris角点检测算法,先确定车门横梁位置,进而通过锁与横梁的相对位置,获取锁的坐标区域。上位PC机在得到绞锁区域坐标后,对绞锁区域图像进行膨胀运算,增强铁丝的灰度信息。再根据膨胀过后图像的大津法阈值,判断车门绞锁与否。
利用移相干涉术获得的多幅光学干涉图像,获得被测物体形貌对应的包裹相位图像,根据包裹相位图像的相位信息构建可靠的相位数据质量图,利用质量图指导二维相位展开的进程,可克服光学干涉图像中的噪声、遮挡、欠采样等不利因素,获得误差最小的物体三维原始形貌。
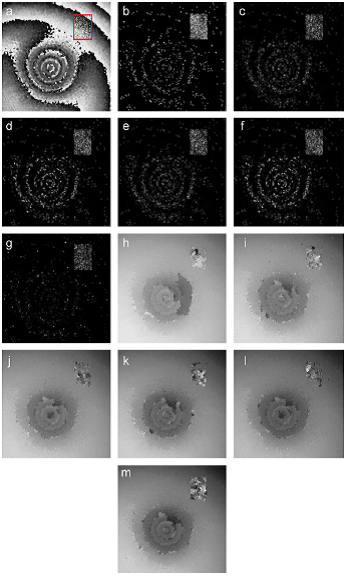

精密微光学器件表面图像的复原 螺旋剪切图像的复原
Y. Lu,et.al, Optics and Lasers in Engineering, 50:1397, 2012
版权声明:本文内容由网络用户投稿,版权归原作者所有,本站不拥有其著作权,亦不承担相应法律责任。如果您发现本站中有涉嫌抄袭或描述失实的内容,请联系我们jiasou666@gmail.com 处理,核实后本网站将在24小时内删除侵权内容。


